สำรวจความไม่แน่นอน
สำหรับโมดูล Qiskit in Classrooms นี้ นักเรียนต้องมีสภาพแวดล้อม Python ที่ใช้งานได้พร้อมกับแพ็กเกจต่อไปนี้ติดตั้งอยู่:
qiskitv2.1.0 หรือใหม่กว่าqiskit-ibm-runtimev0.40.1 หรือใหม่กว่าqiskit-aerv0.17.0 หรือใหม่กว่าqiskit.visualizationnumpypylatexenc
สำหรับการตั้งค่าและติดตั้งแพ็กเกจข้างต้น ดูคู่มือ Install Qiskit เพื่อรันงานบนคอมพิวเตอร์ควอนตัมจริง นักเรียนต้องสร้างบัญชีกับ IBM Quantum® โดยทำตามขั้นตอนในคู่มือ Set up your IBM Cloud account
โมดูลนี้ผ่านการทดสอบแล้วและใช้เวลา QPU ไป 8 นาที ตัวเลขนี้เป็นการประมาณเท่านั้น การใช้งานจริงของแต่ละคนอาจแตกต่างกัน การคำนวณที่ใช้เวลานานสองรายการมีการระบุไว้ในคอมเมนต์ส่วนหัว และสามารถรันบนซิมูเลเตอร์ได้หากนักเรียนมีเวลา QPU จำกัด โดยไม่นับสองรายการนั้น โมดูลนี้ต้องการเวลา QPU เพียง ~30 วินาที
# Added by doQumentation — required packages for this notebook
!pip install -q matplotlib numpy qiskit qiskit-aer qiskit-ibm-runtime
# Uncomment and modify this line as needed to install dependencies
#!pip install 'qiskit>=2.1.0' 'qiskit-ibm-runtime>=0.40.1' 'qiskit-aer>=0.17.0' 'numpy' 'pylatexenc'
ดูวิดีโอแนะนำโมดูลโดย Dr. Katie McCormick ด้านล่าง หรือคลิก ที่นี่ เพื่อดูบน YouTube
บทนำ
คุณคงเคยได้ยินเรื่องหลักความไม่แน่นอนมาบ้าง แม้แต่นอกห้องเรียนฟิสิกส์ คำอธิบายทั่วไปที่มักได้ยินคือ "การที่เราสังเกตสิ่งใดก็ตาม ก็ส่งผลต่อมันอยู่ดี" ซึ่งก็เป็นความจริงอยู่ แต่ในเชิงฟิสิกส์ ความไม่แน่นอนหมายความว่ามีตัวแปรทางกายภาพที่วัดได้บางคู่ที่มีความไม่เข้ากัน ทำให้ไม่สามารถรู้ค่าทั้งสองได้อย่างแม่นยำในเวลาเดียวกัน หลายคนรู้จักคู่ตัวแปรที่ไม่เข้ากันนี้ครั้งแรกในรูปของ และ คือตำแหน่งบนแกน และโมเมนตัมเชิงเส้นตามทิศทางนั้น ตามลำดับ สำหรับตัวแปรเหล่านั้น ข้อจำกัดความไม่แน่นอนเขียนได้ว่า ที่นี่ เรียกว่า "ความไม่แน่นอนใน " ซึ่งมีนิยามเดียวกับส่วนเบี่ยงเบนมาตรฐานในสถิติ และสามารถนิยามได้ว่า นิยามในแบบเดียวกัน ในที่นี้ เราจะไม่อนุมานความสัมพันธ์ความไม่แน่นอนนี้ แต่จะชี้ให้เห็นว่ามันสอดคล้องกับความเข้าใจของเราเกี่ยวกับคลื่นคลาสสิก กล่าวคือ คลื่นที่มีความถี่ และความยาวคลื่น ที่แน่นอนเพียงหนึ่งเดียวจะดำเนินต่อไปเป็นอนันต์ในรูปของไซนัสอยด์สมบูรณ์ ในเชิงควอนตัม นี่จะสอดคล้องกับการรู้โมเมนตัมได้อย่างสมบูรณ์ตามสมมติฐานของ de Broglie: แต่เพื่อจะรู้ ว่าอนุภาคที่มีลักษณะเหมือนคลื่นอยู่ที่ไหน คลื่นที่อธิบายมันต้องแคบลงอย่างมากในอวกาศ เช่น เป็น Gaussian แคบมาก เราทราบว่าสามารถแสดงฟังก์ชันต่อเนื่องใด ๆ รวมถึงฟังก์ชันคลื่นที่แคบเช่นนั้น ในรูปอนุกรม Fourier ของฟังก์ชันไซนัสที่มีความยาวคลื่นต่างกัน แต่เมื่อฟังก์ชันคลื่นแคบลงมากขึ้น (และตำแหน่งรู้ดีขึ้น) เราต้องการพจน์มากขึ้นในอนุกรม Fourier หมายความว่ามีความยาวคลื่นหลายค่าผสมกัน (และในเชิงควอนตัม มีค่าโมเมนตัมหลายค่า)
พูดง่าย ๆ คือ สถานะที่มีโมเมนตัมชัดเจน (ไซนัสอยด์สมบูรณ์ในอวกาศ) จะมีความไม่แน่นอนของตำแหน่งสูงมาก ส่วนสถานะที่มีตำแหน่งชัดเจน (เช่น การแจกแจงเดลต้าของ Dirac) จะมีความไม่แน่นอนของโมเมนตัมสูงมาก
ยังมีตัวแปรอื่น ๆ ที่แสดงความไม่เข้ากันแบบนี้ด้วย ตัวอย่างเช่น สปินของอนุภาคอาจมีการฉายที่ชัดเจนบนแกนหนึ่ง แต่เราจะไม่รู้อะไรเลยเกี่ยวกับการฉายบนแกนตั้งฉาก ตัวอย่างเช่น สถานะ (สำหรับ Qubit หรืออนุภาคสปิน-1/2) มีการฉายที่ชัดเจนบนแกน (เท่ากับ 1 ในบริบทของ Qubit และเท่ากับ ในบริบทของอนุภาคสปิน-1/2) แต่สถานะนี้สามารถเขียนเป็นการซ้อนทับของสองสถานะที่ต่างก็มีการฉายที่ชัดเจนบนแกน : หรือเขียนแบบเทียบเท่าได้ว่า มีการฉายที่ชัดเจนบน เช่นเดียวกับ ดังนั้นถ้าเรากำหนดการฉายของสถานะบนแกน เราจะไม่รู้การฉายบนแกน และถ้าเรากำหนดการฉายบนแกน เราก็จะไม่รู้การฉายบน มีความแตกต่างเล็กน้อยเมื่อพูดถึงบริบทของสปินและ Qubit แต่โดยทั่วไปแล้ว eigenstates ของเมทริกซ์ Pauli มีความสัมพันธ์ที่น่าสนใจที่เราสามารถสำรวจได้ ตลอดบทเรียนนี้ เราจะทดสอบสัญชาตญาณของเราเกี่ยวกับความไม่แน่นอนในตัวแปรที่ไม่เข้ากันเหล่านี้ และตรวจสอบว่าความสัมพันธ์ความไม่แน่นอนยังคงอยู่บนคอมพิวเตอร์ควอนตัมของ IBM®
การตรวจสอบสัญชาตญาณเบื้องต้น
ในการทดลองแรกนี้และตลอดโมดูล เราจะใช้กรอบการทำงานสำหรับการคำนวณควอนตัมที่เรียกว่า "Qiskit patterns" ซึ่งแบ่งกระบวนการทำงานออกเป็นขั้นตอนดังนี้:
- ขั้นตอนที่ 1: แปลง input ในรูปแบบคลาสสิกให้เป็นปัญหาควอนตัม
- ขั้นตอนที่ 2: ปรับปัญหาให้เหมาะสมสำหรับการประมวลผลบนควอนตัม
- ขั้นตอนที่ 3: รันโดยใช้ Qiskit Runtime Primitives
- ขั้นตอนที่ 4: การประมวลผลหลังและการวิเคราะห์แบบคลาสสิก
โดยทั่วไปเราจะทำตามขั้นตอนเหล่านี้ แม้ว่าจะไม่ได้ระบุชื่อขั้นตอนเสมอไป
ลองเริ่มด้วยการโหลดแพ็กเกจที่จำเป็น รวมถึง Runtime primitives เราจะเลือกคอมพิวเตอร์ควอนตัมที่ว่างที่สุดที่มีให้ใช้งาน
โค้ดด้านล่างมีส่วนสำหรับบันทึกข้อมูลประจำตัวในการใช้งานครั้งแรก ตรวจสอบให้แน่ใจว่าได้ลบข้อมูลนี้ออกจาก notebook หลังจากบันทึกไว้ในสภาพแวดล้อมของคุณแล้ว เพื่อป้องกันการแชร์ข้อมูลประจำตัวโดยไม่ตั้งใจเมื่อแชร์ notebook ดู Set up your IBM Cloud account และ Initialize the service in an untrusted environment สำหรับคำแนะนำเพิ่มเติม
from numpy import pi
# Load the Qiskit Runtime service
from qiskit_ibm_runtime import QiskitRuntimeService
# Syntax for first saving your token. Delete these lines after saving your credentials.
# QiskitRuntimeService.save_account(channel='ibm_quantum_platform',
# instance = '<YOUR_IBM_INSTANCE_CRN>', token='<YOUR-API_KEY>', overwrite=True, set_as_default=True)
# service = QiskitRuntimeService(channel='ibm_quantum_platform')
# Load saved credentials
service = QiskitRuntimeService()
# Load the Runtime primitive and session
from qiskit_ibm_runtime import (
Batch,
SamplerV2 as Sampler,
EstimatorV2 as Estimator,
)
# Use the least busy backend
backend = service.least_busy(min_num_qubits=127)
print(backend.name)
ibm_sherbrooke
หากนักเรียนใช้เวลาคอมพิวเตอร์ควอนตัมที่มีอยู่หมดระหว่างบทเรียน สามารถเอาคอมเมนต์ออกจากโค้ดด้านล่างเพื่อตั้งค่าซิมูเลเตอร์ที่จำลองพฤติกรรมสัญญาณรบกวนของคอมพิวเตอร์ควอนตัมที่เลือกไว้บางส่วนได้
# Import an estimator, this time from qiskit (we will import from Runtime for real hardware)
from qiskit_aer.primitives import SamplerV2, EstimatorV2
from qiskit_aer.noise import NoiseModel
# Generate the noise model from the backend properties
noise_model = NoiseModel.from_backend(backend)
noisy_sampler = SamplerV2(options={"backend_options": {"noise_model": noise_model}})
noisy_estimator = EstimatorV2(options={"backend_options": {"noise_model": noise_model}})
คุณน่าจะจำได้ว่า eigenstate ของตัวดำเนินการ Z หนึ่งตัว ไม่ใช่ eigenstate ของตัวดำเนินการ X อีกตัว เราจะสังเกตเรื่องนี้ตอนนี้ โดยการวัดตามแกน และ ในทางทดลอง สำหรับการวัดตามแกน เราใช้ qc.measure() เพราะคอมพิวเตอร์ควอนตัม IBM ออกแบบมาให้วัดตามแกน แต่สำหรับการวัดตามแกน เราต้องหมุนระบบเพื่อย้ายแกน ให้ขึ้นมาอยู่ในทิศทางที่เราวัด ทำได้ด้วย Hadamard Gate และต้องทำขั้นตอนคล้ายกันสำหรับการวัดตามแกน รวบรวมขั้นตอนที่จำเป็นไว้ที่นี่เพื่อความสะดวก:
- การวัดตามแกน :
qc.measure() - การวัดตามแกน :
qc.h()แล้วqc.measure() - การวัดตามแกน :
qc.sdg(),qc.h(),qc.sแล้วqc.measure()
ขั้นตอนที่ 1: แปลง input คลาสสิกให้เป็นปัญหาควอนตัม
ในกรณีนี้ ขั้นตอนการแปลงก็แค่แสดงการวัดและการหมุนที่อธิบายข้างต้นใน Circuit ควอนตัม:
# Step 1: Map
# Import some general packages
from qiskit import ClassicalRegister, QuantumCircuit, QuantumRegister
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(2, "c")
qc = QuantumCircuit(qr, cr)
# Add a first measurement
qc.measure(qr, cr[0])
qc.barrier()
# Change basis so that measurements made on quantum computer which normally tell us about z,
# now tell us about x.
qc.h(qr)
# Add a second measurement
qc.measure(qr, cr[1])
qc.draw("mpl")

ขั้นตอนที่ 2: ปรับปัญหาให้เหมาะสมสำหรับการประมวลผลบนควอนตัม
ขั้นตอนนี้นำการดำเนินการที่ต้องการทำมาแสดงในรูปของฟังก์ชันการทำงานของคอมพิวเตอร์ควอนตัมเฉพาะ และยังแมปปัญหาของเราลงบนโครงสร้างของคอมพิวเตอร์ควอนตัมด้วย
# Step 2: Transpile
from qiskit.transpiler.preset_passmanagers import generate_preset_pass_manager
target = backend.target
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
ขั้นตอนที่ 3: รันโดยใช้ Qiskit Runtime primitives
เราสามารถใช้ Sampler เพื่อเก็บสถิติของการวัดได้ เราจะสร้าง Sampler primitive ให้รันบนคอมพิวเตอร์ควอนตัมจริงโดยใช้ mode = backend มีโหมดอื่น ๆ สำหรับกระบวนการทำงานอื่น และเราจะใช้หนึ่งในนั้นด้านล่าง Sampler จะถูกเรียกใช้ผ่านเมธอด run() พร้อมกับรายการ "pubs" (Primitive Unified Blocs) แต่ละ PUB ประกอบด้วยค่าสูงสุดสามค่าที่รวมกันกำหนดหน่วยการคำนวณสำหรับ Estimator: Circuits, observables, parameters คุณยังระบุรายการ Circuit, รายการ observables และรายการ parameters ได้ด้วย สำหรับข้อมูลเพิ่มเติม อ่าน Overview of PUBs.
เราต้องการรันบนคอมพิวเตอร์ควอนตัมจริง เพื่อให้เป็นการทดลองฟิสิกส์ควอนตัมจริง ๆ ถ้าคุณใช้เวลาบนคอมพิวเตอร์ควอนตัมจริงหมดแล้ว คุณสามารถคอมเมนต์โค้ดด้านล่างสำหรับคอมพิวเตอร์ควอนตัม และเอาคอมเมนต์ออกจากโค้ดสำหรับรันบนซิมูเลเตอร์ได้
# Step 3: Run the job on a real quantum computer
sampler = Sampler(mode=backend)
pubs = [qc_isa]
job = sampler.run(pubs)
res = job.result()
counts = res[0].data.c.get_counts()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_sampler.run([qc_isa])
# res=job.result()
# counts=res[0].data.c.get_counts()
ขั้นตอนที่ 4: การประมวลผลหลัง
นี่เป็นกรณีการประมวลผลหลังที่เรียบง่ายมาก เราแค่แสดงผลจำนวนนับเป็นภาพ
โปรดทราบว่า Qiskit เรียงลำดับ Qubit, การวัด และสิ่งอื่น ๆ โดยวางรายการที่มีหมายเลขต่ำสุดไว้ท้าย/ทางขวา ซึ่งเรียกว่าระบบ "little-endian" หมายความว่าคอลัมน์ที่มีป้ายกำกับว่า "10" ด้านล่างหมายถึงจำนวนนับที่การวัดครั้งแรกได้ "0" และการวัดครั้งที่สองได้ "1"
# Step 4: Post-process
from qiskit.visualization import plot_histogram
plot_histogram(counts)

ถ้าการนิยามนี้ไม่ถูกใจคุณ คุณสามารถใช้ marginal_counts เพื่อแสดงผลของแต่ละการวัดแยกกันได้:
from qiskit.result import marginal_counts
plot_histogram(
marginal_counts(counts, indices=[0]), title="Counts after first measurement"
)

plot_histogram(
marginal_counts(counts, indices=[1]), title="Counts after second measurement"
)

ค่าเริ่มต้นใน Qiskit จะอยู่ในสถานะ จึงไม่น่าแปลกใจที่การวัดครั้งแรกแทบทั้งหมดได้ผลเป็น อย่างไรก็ตาม สังเกตว่าการวัดครั้งที่สอง (ที่ให้ข้อมูลเกี่ยวกับการฉายของสถานะบน ) แทบจะแบ่งครึ่งเท่ากัน ดูเหมือนว่าสถานะที่ให้ผลการวัดตามแกน ที่คาดเดาได้มาก จะให้ผลการวัดตามแกน ที่คาดเดาได้น้อยมาก มาสำรวจเรื่องนี้กัน
จะเกิดอะไรขึ้นถ้าเปลี่ยนลำดับการวัด เราอาจเริ่มด้วยการใช้ Hadamard Gate เพื่อหาสถิติความน่าจะเป็นของ ที่ถูกวัดใน แล้วสำหรับการวัดครั้งที่สอง เราจะเปลี่ยนกลับมาที่ฐาน โดยใช้ Hadamard Gate ตัวที่สอง
# Step 1:
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(2, "c")
qc = QuantumCircuit(qr, cr)
# Change basis to measure along x.
qc.h(qr)
qc.measure(qr, cr[0])
qc.barrier()
# Change our basis back to z and make a second measurement
qc.h(qr)
qc.measure(qr, cr[1])
qc.draw("mpl")

# Step 2: Transpile the circuit for running on a quantum computer
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
# Step 3: Run the job on a real quantum computer
sampler = Sampler(mode=backend)
pubs = [qc_isa]
job = sampler.run(pubs)
res = job.result()
counts = res[0].data.c.get_counts()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_sampler.run([qc_isa])
# res=job.result()
# counts=res[0].data.c.get_counts()
# Step 4: Post-process
from qiskit.visualization import plot_histogram
plot_histogram(counts)

ที่นี่ ดูเหมือนว่าเราจะมีความไม่แน่นอนมากยิ่งกว่าเดิม! ก่อนหน้านี้อย่างน้อยเรารู้ว่าผลลัพธ์ของการวัดครั้งแรกจะเป็นอะไร แต่ตอนนี้ได้การกระจายที่ค่อนข้างสม่ำเสมอทั่วทุกสถานะที่เป็นไปได้ ไม่ยากที่จะเห็นว่าทำไมถึงเกิดขึ้นเช่นนี้ เราเริ่มจากสถานะ ซึ่งเป็นการผสม 50-50 ของ และ ตาม จึงควรมีความน่าจะเป็นเท่ากันในการได้สถานะ + หรือ - (แมปเป็น 0 และ 1 ในแผนภูมิ) สำหรับการวัดครั้งแรก การวัดตามแกน ทำให้สถานะยุบตัวลงเป็น eigenstate หรือ eigenstate แต่ละสถานะเหล่านั้นเป็นการผสม 50-50 ของ และ ตาม ดังนั้นเมื่อระบบอยู่ใน eigenstate ของ แล้ว การวัดตามแกน จะได้ทั้ง และ ด้วยความน่าจะเป็นเกือบเท่ากัน ตัวอย่างแรกแสดงให้เราเห็นว่าสถานะบางสถานะจะให้ผลลัพธ์ที่คาดเดาได้มากสำหรับการวัดบางอย่าง แต่คาดเดาไม่ได้สำหรับการวัดอื่น ตัวอย่างปัจจุบันแสดงให้เห็นว่าเราสามารถทำได้แย่กว่านั้น มีสถานะที่ให้ผลลัพธ์ที่คาดเดาไม่ได้สำหรับการวัดทั้งสอง แม้ว่าสิ่งที่เราทำจะเป็นแค่การสลับลำดับการวัด มาศึกษาว่าปริมาณหนึ่ง ๆ มีความแน่นอนหรือไม่แน่นอนแค่ไหนสำหรับสถานะที่กำหนด
การคำนวณความไม่แน่นอน
เราสามารถวัดค่านี้เชิงปริมาณได้โดยใช้ความไม่แน่นอน หรือความแปรปรวน "ความไม่แน่นอน" มักนิยามให้เป็นรากที่สองของ "ความแปรปรวน" ของการกระจาย กล่าวคือ ความไม่แน่นอนสำหรับ observable บางตัว แทนด้วย และให้ค่าดังนี้
สำหรับกรณีของเมทริกซ์ Pauli ที่ จะได้ว่า
มาประยุกต์ใช้กับตัวอย่างที่เป็นรูปธรรม เริ่มด้วยสถานะ และหาความไม่แน่นอนของ observable ในสถานะนั้น
ตรวจสอบความเข้าใจ
อ่านคำถามด้านล่าง คิดคำตอบของตัวเอง แล้วคลิกที่สามเหลี่ยมเพื่อดูเฉลย
คำนวณความไม่แน่นอนของ ในสถานะ ด้วยมือ
คำตอบ:
ในสถานะที่กำหนด สิ่งนี้ให้ค่า:
เราสามารถสร้างสถานะเริ่มต้นแบบใดก็ได้โดยใช้ qc.initialize() โปรดทราบว่าไวยากรณ์ของหน่วยจินตภาพในที่นี้คือ
# Step 1: Map the problem into a quantum circuit
from qiskit.quantum_info import SparsePauliOp
import numpy as np
obs = SparsePauliOp("X")
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(1, "c")
qc = QuantumCircuit(qr, cr)
# Initialize the state
qc.initialize([1, 1j] / np.sqrt(2))
# Step 2: Transpile the circuit
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
obs_isa = obs.apply_layout(layout=qc_isa.layout)
# Step 3: Run the circuit on a real quantum computer
estimator = Estimator(mode=backend)
pubs = [(qc_isa, obs_isa)]
job = estimator.run([[qc_isa, obs_isa]])
res = job.result()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_estimator.run([[qc_isa,obs_isa]])
# res=job.result()
# Step 4: Return the result in classical form, and analyze.
print(res[0].data.evs)
-0.02408454165642664
ตามสมการข้างต้น มาคงสถานะเดิมนั้นไว้ แต่หาค่าความคาดหวังของ แทน:
# Step 1: Map the problem into a quantum circuit
obs = SparsePauliOp("Z")
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(1, "c")
qc = QuantumCircuit(qr, cr)
# Initialize the state to |+>_y
qc.initialize([1, 1j] / np.sqrt(2))
# Step 2: Transpile the circuit
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
obs_isa = obs.apply_layout(layout=qc_isa.layout)
# Step 3: Run the circuit on a real quantum computer
estimator = Estimator(mode=backend)
pubs = [(qc_isa, obs_isa)]
job = estimator.run(pubs)
res = job.result()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_estimator.run([[qc_isa,obs_isa]])
# res=job.result()
# Step 4: Return the result in classical form, and analyze.
print(res[0].data.evs)
0.04958271968581247
เราสามารถทำคณิตศาสตร์แบบเดิมได้ แต่จะเห็นว่าความแปรปรวนอยู่ใกล้ 1.0 อีกครั้ง เราอาจสรุปได้ว่า จริง ๆ แล้วนี่เป็นค่าโดยประมาณที่ถูกต้องสำหรับสถานะที่เราเลือก แต่เราทำได้ดีกว่า หรือแย่กว่า ได้ไหม?
ลองนึกถึงความสัมพันธ์ความไม่แน่นอนระหว่างตำแหน่งตามทิศทางหนึ่ง และโมเมนตัมตามทิศทางเดียวกัน สำหรับตัวแปรเหล่านั้น รูปแบบที่คุ้นเคยที่สุดน่าจะเป็น ถ้านี่เป็นสิ่งที่เราจำได้อย่างเดียว เราอาจถูกชักจูงให้คิดว่า และ ก็อาจมีขีดจำกัดพื้นฐานของความไม่แน่นอนเช่นกัน บางทีอาจเป็นไปไม่ได้ที่ผลคูณ จะลดลงถึงศูนย์? มาลองใช้สถานะอื่นและดูว่าเป็นจริงไหม คราวนี้เราจะใช้ มาดูว่าจะเกิดอะไรขึ้น โปรดทราบว่าในโค้ดด้านล่าง Estimator สามารถรับ Circuit และ observables สองชุดในการส่งงานครั้งเดียวได้
# Step 1: Map the problem into a quantum circuit
obs1 = SparsePauliOp("X")
obs2 = SparsePauliOp("Z")
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(1, "c")
qc = QuantumCircuit(qr, cr)
# Initialize the state
qc.initialize([1, 1] / np.sqrt(2))
# Step 2: Transpile the circuit
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
obs1_isa = obs1.apply_layout(layout=qc_isa.layout)
obs2_isa = obs2.apply_layout(layout=qc_isa.layout)
# Step 3: Run the circuit on a real quantum computer
with Batch(backend=backend) as batch:
estimator = Estimator(mode=batch)
pubs = [(qc_isa, obs1_isa), (qc_isa, obs2_isa)]
job = estimator.run(pubs)
res = job.result()
batch.close()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_estimator.run([[qc,obs1],[qc,obs2]])
# res=job.result()
# Step 4: Return the result in classical form, and analyze.
print("The expectation value of the first observable is: ", res[0].data.evs)
print("The expectation value of the second observable is: ", res[1].data.evs)
The expectation value of the first observable is: 1.0011036174126302
The expectation value of the second observable is: 0.0029429797670141016
ค่าความคาดหวังของ ควรอยู่ใกล้ 1.0 แต่ไม่ควรเกิน 1.0 ไม่ต้องกังวลถ้ามันเกิน 1.0 เพียงเล็กน้อย เนื่องมาจากปัจจัยต่าง ๆ เช่น สัญญาณรบกวนและ/หรือ readout error แม้ว่านี่เป็นหัวข้อที่สำคัญมาก เราสามารถละเว้นมันได้ในตอนนี้
เราได้ค่าความคาดหวังของ ที่ใกล้ 1.0 มาก (สอดคล้องกับความแปรปรวนต่ำมากสำหรับ ) ซึ่งทำให้ผลคูณของความแปรปรวนทั้งสองค่อนข้างต่ำ:
แม้ว่าค่านี้จะไม่ใช่ศูนย์พอดี แต่กำลังมีค่าน้อยเมื่อเทียบกับค่า eigenvalue ของตัวดำเนินการ Pauli () คุณอาจจำได้ว่าความสัมพันธ์ความไม่แน่นอนระหว่างตำแหน่งเชิงเส้นและโมเมนตัมสามารถเขียนได้ต่างออกไป โดยใช้ความสัมพันธ์การสับเปลี่ยนระหว่างตัวดำเนินการ และ อย่างชัดเจน:
โดยที่
คือคอมมิวเตเตอร์ของ และ
นี่คือรูปแบบที่สามารถขยายไปยังตัวดำเนินการ Pauli ได้ง่ายที่สุด โดยทั่วไปสำหรับตัวดำเนินการสองตัว และ ,
และในกรณีของเมทริกซ์ Pauli และ เราต้องการ เพื่อคำนวณ
เราแสดงให้เห็นที่นี่ และปล่อยให้การคำนวณคล้ายกันเป็นแบบฝึกหัดสำหรับผู้อ่าน:
นี่เป็นคำตอบที่ยอมรับได้ แต่อีกหนึ่งขั้นตอน เราจะเห็นว่า
ความสัมพันธ์ความไม่แน่นอนของเราจึงกลายเป็น
ตรวจสอบความเข้าใจ
อ่านคำถามด้านล่าง คิดคำตอบของตัวเอง แล้วคลิกที่สามเหลี่ยมเพื่อดูเฉลย
หา และ ใช้ผลที่ได้เพื่อเขียนความสัมพันธ์ความไม่แน่นอนระหว่าง & และ &
คำตอบ:
รวมกับความสัมพันธ์ความไม่แน่นอนทั่วไป จะได้
ตรวจสอบความสอดคล้อง
ก่อนจะดำเนินต่อ มาตรวจสอบว่าสอดคล้องกับผลที่ได้ก่อนหน้า เราใช้สถานะ และพบว่า ตอนนี้เราทราบว่าผลคูณนี้ควรมากกว่าหรือเท่ากับ
ดังนั้น แน่นอน ใช้คำถามด้านล่างเพื่อสร้างสัญชาตญาณสำหรับผลลัพธ์เหล่านี้:
ตรวจสอบความเข้าใจ
อ่านคำถามด้านล่าง คิดคำตอบของตัวเอง แล้วคลิกที่สามเหลี่ยมเพื่อดูเฉลย
ตอบรายการต่อไปนี้ร่วมกันเป็นชุด:
(a) คุณคาดว่าสถานะใดจะมีความไม่แน่นอนศูนย์ใน ?
(b) คุณคาดว่าสถานะใดจะมีความไม่แน่นอนศูนย์ใน ?
(c) ในสถานะใดที่คุณจะได้ค่าความคาดหวังเป็นศูนย์ ?
(d) คำตอบของคำถามข้างต้นสอดคล้องกับกรณี หรือไม่?
(e) เขียนโค้ดเพื่อตรวจสอบนี้อย่างชัดเจนโดยใช้ Estimator
คำตอบ:
(a) เราอาจคาดว่า eigenstates ของตัวดำเนินการ จะให้ความไม่แน่นอนเป็นศูนย์ใน จริง ๆ โดยใช้ เราได้
(b) เราอาจคาดว่า eigenstates ของตัวดำเนินการ จะให้ความไม่แน่นอนเป็นศูนย์ใน จริง ๆ โดยใช้ เราได้
(c) เราคาดว่าจะพบ สำหรับสถานะใด ๆ ที่เมื่อวัดแล้วให้การฉายบวกบนแกน บ่อยพอ ๆ กับการฉายลบ ซึ่งรวมถึง eigenstates ของ และ
(d) ใช่ คาดว่าผลคูณของความไม่แน่นอน จะมีค่าน้อยมากสำหรับ eigenstates ของ หรือ : สิ่งนี้สามารถเป็นจริงได้เพราะเราจะคาดว่า สำหรับสถานะเดียวกันนั้นด้วย ดังนั้นความสัมพันธ์ความไม่แน่นอนจึงสามารถสมดุลได้
(e) โค้ดเช่นต่อไปนี้จะตรวจสอบนี้ได้:
obs1 = SparsePauliOp.from_list(
[("X", 1.000)]
)
obs2 = SparsePauliOp.from_list(
[("Y", 1.000)]
)
obs3 = SparsePauliOp.from_list(
[("Z", 1.000)]
)
qc = QuantumCircuit(1,1)
qc.ry(pi/2,0)
job = estimator.run([(qc, [[obs1], [obs2], [obs3]])], precision=0.001)
res=job.result()
ซึ่งผลลัพธ์จะคืนค่าความคาดหวังทั้งหมด เพื่อดึงค่าความคาดหวังทั้งหมดและคำนวณความไม่แน่นอน เราสามารถใช้:
xs=res[0].data.evs[0]
ys=abs(res[0].data.evs[1])
zs=res[0].data.evs[2]
import math
prodxz=((1-xs[i]*xs[i])**0.5)*(1-zs[i]*zs[i])**0.5
ตอบรายการต่อไปนี้ร่วมกันเป็นชุด:
(a) คุณนึกถึงสถานะที่มีค่าความคาดหวัง สูงได้ไหม?
(b) คุณคาดว่าสถานะเดียวกันนั้นจะมีความไม่แน่นอนใน มากหรือน้อย?
(c) คุณคาดว่าสถานะเดียวกันนั้นจะมีความไม่แน่นอนใน มากหรือน้อย?
(d) คำตอบของคำถามข้างต้นสอดคล้องกับกรณี หรือไม่?
(e) เขียนโค้ดเพื่อตรวจสอบนี้อย่างชัดเจนโดยใช้ Estimator
คำตอบ:
(a) เราคาดว่าจะพบ สำหรับ eigenstate ของ :
(b) เราอาจคาดว่า จะมีความไม่แน่นอนสูงในสถานะ เนื่องจากการวัด ในสถานะนั้นจะให้ผลบวกและผลลบด้วยความถี่/ความน่าจะเป็นเท่ากัน
(c) เราอาจคาดว่า จะมีความไม่แน่นอนสูงในสถานะ เนื่องจากการวัด ในสถานะนั้นจะให้ผลบวกและผลลบด้วยความถี่/ความน่าจะเป็นเท่ากัน
(d) ใช่ คาดว่าผลคูณของความไม่แน่นอน จะมีค่ามากสำหรับ eigenstates ของ และสำหรับ โดยเฉพาะ นอกจากนี้เราจะคาดว่า สำหรับสถานะเดียวกันนั้น ดังนั้นทั้ง และ มีค่าค่อนข้างมากในสถานะนี้ และเป็นไปได้ที่ความสัมพันธ์ความไม่แน่นอนจะยังคงสมดุลได้อีกครั้ง
(e) โค้ดเช่นต่อไปนี้จะตรวจสอบนี้ได้:
obs1 = SparsePauliOp.from_list(
[("X", 1.000)]
)
obs2 = SparsePauliOp.from_list(
[("Y", 1.000)]
)
obs3 = SparsePauliOp.from_list(
[("Z", 1.000)]
)
qc = QuantumCircuit(1,1)
qc.rx(-pi/2,0)
job = estimator.run([(qc, [[obs1], [obs2], [obs3]])], precision=0.001)
res=job.result()
ซึ่งผลลัพธ์จะคืนค่าความคาดหวังทั้งหมด เพื่อดึงค่าความคาดหวังทั้งหมดและคำนวณความไม่แน่นอน เราสามารถใช้:
xs=res[0].data.evs[0]
ys=abs(res[0].data.evs[1])
zs=res[0].data.evs[2]
import math
prodxz=((1-xs[i]*xs[i])**0.5)*(1-zs[i]*zs[i])**0.5
การทดสอบความสัมพันธ์ความไม่แน่นอน
การทดสอบข้างต้นแสดงให้เห็นความถูกต้องของความสัมพันธ์ความไม่แน่นอนสำหรับสถานะเวกเตอร์เดียว เท่านั้น เพื่อให้มั่นใจว่าสอดคล้องกับการทดลองโดยทั่วไป เราควรทำการคำนวณคล้ายกันโดยใช้ Estimator สำหรับตัวเลือกสถานะเวกเตอร์หลาย ๆ แบบ มาเริ่มด้วยการหมุนสถานะเวกเตอร์ให้ออกจากแกน โดยใช้ Gate RY เพื่อสร้างสถานะเริ่มต้นต่าง ๆ โดยใช้พารามิเตอร์
# The calculation below uses approximately 3-4 minutes of QPU time.
# Step 1: Map the problem into a quantum circuit
from qiskit.circuit import Parameter
import numpy as np
# Specify observables
obs1 = SparsePauliOp("X")
obs2 = SparsePauliOp("Y")
obs3 = SparsePauliOp("Z")
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(1, "c")
qc = QuantumCircuit(qr, cr)
# Rotate away from |0>
theta = Parameter("θ")
qc.ry(theta, 0)
params = np.linspace(0, 2, num=21)
# Step 2: Transpile the circuit
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
obs1_isa = obs1.apply_layout(layout=qc_isa.layout)
obs2_isa = obs2.apply_layout(layout=qc_isa.layout)
obs3_isa = obs3.apply_layout(layout=qc_isa.layout)
# Step 3: Run the circuit on a real quantum computer
with Batch(backend=backend) as batch:
estimator = Estimator(mode=batch)
pubs = [(qc_isa, [[obs1_isa], [obs2_isa], [obs3_isa]], [params])]
job = estimator.run(pubs, precision=0.01)
res = job.result()
batch.close()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_estimator.run([(qc, [[obs1], [obs2], [obs3]], [params])])
# res=job.result()
# Step 4: Post-processing and classical analysis.
xs = res[0].data.evs[0]
ys = abs(res[0].data.evs[1])
zs = res[0].data.evs[2]
# Calculate uncertainties
delx = []
delz = []
prodxz = []
for i in range(len(xs)):
delx.append(abs((1 - xs[i] * xs[i])) ** 0.5)
delz.append(abs((1 - zs[i] * zs[i])) ** 0.5)
prodxz.append(delx[i] * delz[i])
# Here we can plot the results from this simulation.
import matplotlib.pyplot as plt
plt.plot(params, delx, label=r"$\Delta$ X")
plt.plot(params, ys, label=r"$\langle$ Y $\rangle$")
plt.plot(params, delz, label=r"$\Delta$ Z")
plt.plot(params, prodxz, label=r"$\Delta$X $\Delta$Z")
plt.xlabel(r"$\theta$")
plt.ylabel("Expectation/Uncertainty Values")
plt.legend()
plt.show()

สังเกตว่าเส้นโค้งสีแดง มีค่ามากกว่าเส้นโค้งสีส้ม เสมอ บางครั้งผลคูณความไม่แน่นอนลดลงและใกล้ขีดจำกัด บางครั้งก็เพิ่มขึ้นและห่างจากขีดจำกัด แต่มันปฏิบัติตามความสัมพันธ์ความไม่แน่นอนเสมอ
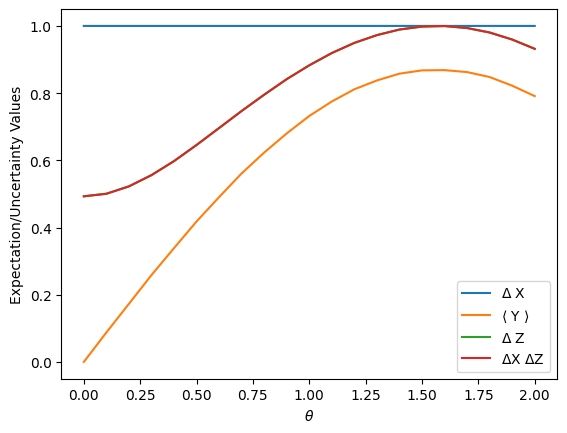
แน่นอนว่านี่อาจไม่ใช่การทดสอบที่ดีที่สุดสำหรับความสัมพันธ์ความไม่แน่นอน เนื่องจากขีดจำกัด อยู่ใกล้ศูนย์มากเสมอ มาใช้สถานะควอนตัมที่มีการฉายบน eigenstates ของ มากกว่า โดยเฉพาะ เราจะยังคงหมุน ลงจากแกน ด้วยมุมต่าง ๆ แต่คราวนี้จะหมุนสถานะที่ได้รอบ ด้วยมุมหนึ่ง เช่น และดูว่าจะเกิดอะไรขึ้น
# The calculation below uses approximately 3-4 minutes of QPU time.
from qiskit.circuit import Parameter
import numpy as np
# Step 1: Map the problem to a quantum circuit
# Specify observables
obs1 = SparsePauliOp("X")
obs2 = SparsePauliOp("Y")
obs3 = SparsePauliOp("Z")
# Define registers
qr = QuantumRegister(1, "q")
cr = ClassicalRegister(1, "c")
qc = QuantumCircuit(qr, cr)
# Rotate away from |0> along one plane, and then along a transverse direction.
theta = Parameter("θ")
qc.ry(theta, 0)
qc.rz(pi / 4, 0)
params = np.linspace(0, 2, num=21)
# Step 2: Transpile the circuit
pm = generate_preset_pass_manager(target=target, optimization_level=3)
qc_isa = pm.run(qc)
obs1_isa = obs1.apply_layout(layout=qc_isa.layout)
obs2_isa = obs2.apply_layout(layout=qc_isa.layout)
obs3_isa = obs3.apply_layout(layout=qc_isa.layout)
# Step 3: Run the circuit on a real quantum computer
with Batch(backend=backend) as batch:
estimator = Estimator(mode=batch)
pubs = [(qc_isa, [[obs1_isa], [obs2_isa], [obs3_isa]], [params])]
job = estimator.run(pubs, precision=0.01)
res = job.result()
batch.close()
# Run the job on the Aer simulator with noise model from real backend
# job = noisy_estimator.run([(qc, [[obs1], [obs2], [obs3]], [params])])
# res=job.result()
# Step 4: Post-processing and classical analysis.
xs = res[0].data.evs[0]
ys = abs(res[0].data.evs[1])
zs = res[0].data.evs[2]
# Calculate uncertainties
delx = []
delz = []
prodxz = []
for i in range(len(xs)):
delx.append(abs((1 - xs[i] * xs[i])) ** 0.5)
delz.append(abs((1 - zs[i] * zs[i])) ** 0.5)
prodxz.append(delx[i] * delz[i])
# Here we can plot the results from this simulation.
import matplotlib.pyplot as plt
plt.plot(params, delx, label=r"$\Delta$ X")
plt.plot(params, ys, label=r"$\langle$ Y $\rangle$")
plt.plot(params, delz, label=r"$\Delta$ Z")
plt.plot(params, prodxz, label=r"$\Delta$X $\Delta$Z")
plt.xlabel(r"$\theta$")
plt.ylabel("Expectation/Uncertainty Values")
plt.legend()
plt.show()

ตอนนี้เราเห็นว่าขีดจำกัดของความไม่แน่นอน กำลังถูกทดสอบ! เส้นโค้งสีแดงเข้าใกล้เส้นโค้งสีส้มมากกว่าก่อนหน้ามาก จริง ๆ แล้ว ในกรณีที่ไม่มีสัญญาณรบกวน ความสัมพันธ์ความไม่แน่นอนจะเท่ากันพอดี () ที่จุดหนึ่ง เมื่อมีสัญญาณรบกวนและ readout error ไม่ควรแปลกใจถ้าการรันบางครั้งได้ มากกว่า เล็กน้อย นี่ไม่ใช่การละเมิดความไม่แน่นอนจริง ๆ แต่เป็นเพียงผลจากความผิดพลาดที่ไม่เป็นศูนย์
ตรวจสอบความเข้าใจ
อ่านคำถามด้านล่าง คิดคำตอบของตัวเอง แล้วคลิกที่สามเหลี่ยมเพื่อดูเฉลย
อธิบายว่าคุณจะผลักให้ถึงขีดจำกัดสูงสุดได้อย่างไร เพื่อให้ มีค่ามากที่สุดเท่าที่จะเป็นไปได้?
คำตอบ:
โค้ดปัจจุบันมีบรรทัดที่หมุนสถานะเริ่มต้น ลงจากแกน ด้วยมุมพารามิเตอร์ และยังหมุนสถานะเวกเตอร์นั้นรอบแกน ด้วยมุม ซึ่งหมุนสถานะเวกเตอร์ไปบางส่วนในทิศทางของแกน
qc.ry(theta,0)
qc.rz(pi/4,0)
เราสามารถเปลี่ยนการหมุนรอบ จาก เป็น เพื่อหมุนไปยัง eigenstate ของ ทั้งหมด:
qc.ry(theta,0)
qc.rz(pi/2,0)
ไม่ต้องเปลี่ยนแปลงอะไรอีก
เปลี่ยนโค้งหรือคัดลอกมาและใช้เพื่อตรวจสอบความสัมพันธ์ความไม่แน่นอนโดยให้ค่าความคาดหวังของ Y ถูกทำให้สูงสุด ความสัมพันธ์ความไม่แน่นอนยังคงอยู่ไหม?
คำตอบ:
เราจะใช้โค้ดจากตัวอย่างข้างต้นทุกประการ โดยแทน
qc.rz(pi/2,0)
แทน
qc.rz(pi/4,0).
ผลลัพธ์ควรมีลักษณะเหมือนด้านล่าง และใช่ หลักความไม่แน่นอนควรยังคงถูกต้อง
แก้ไขโค้งข้างต้นเพื่อสร้างภาพที่คล้ายกัน โดยแสดงว่าจากการวัดบนคอมพิวเตอร์ควอนตัม ผลคูณ ทำงานตามที่ควรเป็น เลือกชุดสถานะใดก็ได้ที่คุณต้องการ
คำตอบ:
เราจะใช้โค้ดจากตัวอย่างข้างต้นทุกประการ และจริง ๆ เราสามารถใช้ผลลัพธ์เดิมจากข้างต้นได้ เพียงแค่ใช้ค่าความคาดหวังเพื่อคำนวณความไม่แน่นอนที่แตกต่างกัน ตัวอย่างเช่น เราสามารถใช้
xs=res[0].data.evs[0]
ys=res[0].data.evs[1]
zs=abs(res[0].data.evs[2])
import math
delx = []
dely = []
prodxy=[]
for i in range(len(xs)):
delx.append((1-xs[i]*xs[i])**0.5)
dely.append((1-ys[i]*ys[i])**0.5)
prodxy.append(((1-xs[i]*xs[i])**0.5)*(1-ys[i]*ys[i])**0.5)
และเราสามารถพล็อต
import matplotlib.pyplot as plt
plt.plot(params, delx, label=r'$\Delta$ X')
plt.plot(params, dely, label=r'$\langle$ Y $\rangle$')
plt.plot(params, zs, label=r'$\Delta$ Z')
plt.plot(params, prodxy, label=r'$\Delta$X $\Delta$Z')
plt.xlabel(r'$\theta$')
plt.ylabel('Expectation/Uncertainty Values')
plt.legend()
plt.show()
ความท้าทาย: เขียนโค้ดเพื่อสแกนผ่านค่า หลาย ๆ ค่า เช่นเดียวกับที่เราสแกนผ่านค่า และสร้างพล็อต 3 มิติที่แสดงว่าความสัมพันธ์ความไม่แน่นอนไม่เคยถูกละเมิด เลือก observables ใดก็ได้ที่คุณต้องการ
คำถาม
ผู้สอนสามารถขอเวอร์ชันของ notebook เหล่านี้พร้อมเฉลยและคำแนะนำในการนำไปใช้ในหลักสูตรทั่วไปได้โดยกรอก แบบสำรวจสั้น ๆ เกี่ยวกับวิธีที่ notebook ถูกนำไปใช้
แนวคิดสำคัญ:
- มีความสัมพันธ์ความไม่แน่นอนระหว่างชุดของตัวแปรทางกายภาพหลายชุด รวมถึงตำแหน่งและโมเมนตัมเชิงเส้น และส่วนประกอบของสปิน
- เมทริกซ์ Pauli ไม่สับเปลี่ยน นี่คือการสะท้อนทางคณิตศาสตร์ของความจริงที่ว่าไม่สามารถรู้/กำหนดส่วนประกอบทั้งหมดของสปินพร้อมกันได้
- การคำนวณควอนตัมใช้ตัวดำเนินการ/เมทริกซ์ Pauli อย่างหนัก ดังนั้นจึงเป็นประโยชน์ที่จะรู้ความสัมพันธ์ความไม่แน่นอนสำหรับตัวดำเนินการ Pauli รวมถึงตัวดำเนินการสปินที่เกี่ยวข้องอย่างใกล้ชิด
- สูตรทั่วไปสำหรับความไม่แน่นอนของตัวดำเนินการสองตัว และ คือ
- eigenstate ของตัวดำเนินการ บางตัว ให้ความไม่แน่นอนเป็นศูนย์ใน observable ทางกายภาพที่เกี่ยวข้องกับตัวดำเนินการนั้น แม้แต่ในเชิงทดลอง
- eigenstate ของตัวดำเนินการ บางตัว จะให้ความไม่แน่นอนมากขึ้นสำหรับตัวดำเนินการ ที่ไม่สับเปลี่ยนกับ
- ผลการทดลองโดยใช้คอมพิวเตอร์ควอนตัมจริงยืนยันสัญชาตญาณที่เราได้จากการแทนค่าเมทริกซ์ของตัวดำเนินการทางกายภาพ
คำถาม จริง/เท็จ:
- จริง/เท็จ สามารถวัด และ พร้อมกันได้ แต่ไม่ใช่
- จริง/เท็จ สามารถวัด และ พร้อมกันได้ แต่ไม่ใช่
- จริง/เท็จ ตัวดำเนินการตำแหน่งเชิงเส้นและโมเมนตัมเชิงเส้นไม่สับเปลี่ยน
- จริง/เท็จ คอมพิวเตอร์ควอนตัม IBM วัดตาม โดยค่าเริ่มต้น ดังนั้นต้องหมุนเพื่อวัดตามทิศทางอื่น
- จริง/เท็จ Circuit ด้านล่างวัด แล้ววัด อย่างมีประสิทธิผล

คำถามแบบเลือกตอบ:
-
แผนภาพด้านล่างแสดงให้เห็นความสัมพันธ์ความไม่แน่นอนข้อใดต่อไปนี้?
- a.
- b.
- c.
- d. ไม่มีข้อใดถูกต้อง
-
ลำดับมาตรฐานในการวัดตามแกน คือข้อใดต่อไปนี้?
- a. เฉพาะ
qc.measure() - b.
qc.h()แล้วqc.measure() - c.
qc.h(),qc.h()แล้วqc.measure() - d.
qc.h(),qc.s,qc.h()แล้วqc.measure() - e.
qc.sdg(),qc.h(),qc.sแล้วqc.measure() - f.
qc.sdg(),qc.h(),qc.s,qc.h()แล้วqc.measure()
- a. เฉพาะ
-
สถานะใดต่อไปนี้ให้ค่าความคาดหวังสูงสุด ?
- a.
- b.
- c. หรือเรียกว่า
- d. หรือเรียกว่า
- e. หรือเรียกว่า
- f. หรือเรียกว่า
-
สถานะใดต่อไปนี้ให้ความไม่แน่นอนสูงสุด ?
- a.
- b. หรือเรียกว่า
- c. หรือเรียกว่า
- d. a และ b เท่ากัน
- e. b และ c เท่ากัน
- f. a, b และ c เท่ากัน
คำถามสำหรับอภิปราย:
-
แนวคิดเรื่องความไม่แน่นอนนี้ขัดแย้งกับมโนทัศน์ของสปินในรูปของลูกศรเวกเตอร์ในปริภูมิคาร์ทีเซียนไหม? แล้วบน Bloch sphere ล่ะ?
-
สมมติว่าคุณวางอุปกรณ์วัดตามทิศทางกึ่งกลางระหว่างแกน และ จะเกิดอะไรขึ้น? คุณสามารถวัดตามทิศทางนั้นได้ไหม? สิ่งนี้เกี่ยวข้องกับความไม่แน่นอนใน และ อย่างไร?
-
คุณต้องการทำการทดลองเพิ่มเติมอะไรบ้างเพื่อโน้มน้าวตัวเองเกี่ยวกับผลลัพธ์ที่ได้ที่นี่?