Multi-product formulas (MPF)
เวอร์ชันของแพ็กเกจ
โค้ดในหน้านี้พัฒนาขึ้นโดยใช้ข้อกำหนดต่อไปนี้ แนะนำให้ใช้เวอร์ชันเหล่านี้หรือใหม่กว่า
Multi-product formulas (MPF) สามารถใช้จำลองไดนามิกส์ของระบบควอนตัมได้แม่นยำยิ่งขึ้น แลกกับการรัน Circuit ที่เพิ่มขึ้น นี่คือเทคนิคการประมวลผลหลัง (post-processing) ที่ช่วยลด error ของค่า expectation values สำหรับสถานะที่วิวัฒนาการตามเวลา
การคำนวณแบบ classical ถูกนำมาใช้แก้ระบบสมการเชิงเส้นที่ให้ coefficients สำหรับการรวมแบบ weighted ของการรัน Circuit หลายครั้ง การใช้การรวมแบบ weighted นี้ช่วยลด error ที่เกิดจากการจำลองการวิวัฒนาการตามเวลา โดยต้องเลือก Trotter steps อย่างเหมาะสม เครื่องมือ MPF จะรับข้อมูล ได้แก่ จำนวน Trotter steps และ order ของการประมาณ Trotter เพื่อเตรียมและแก้ (หรือประมาณค่า) ระบบสมการเชิงเส้นที่เกี่ยวข้อง ซึ่งคุณสามารถนำไปใช้ประมวลผลค่า expectation values ของสถานะที่วิวัฒนาการตามเวลาต่อไปได้
ติดตั้งแพ็กเกจ MPF
มีสองวิธีในการติดตั้งแพ็กเกจ MPF: ผ่าน PyPI และการ build จาก source แนะนำให้ติดตั้งในสภาพแวดล้อมเสมือน เพื่อให้แน่ใจว่าแพ็กเกจ dependencies แยกออกจากกัน
ติดตั้งจาก PyPI
วิธีที่ตรงไปตรงมาที่สุดในการติดตั้งแพ็กเกจ qiskit-addon-mpf คือผ่าน PyPI
pip install qiskit-addon-mpf
Build จาก source
ผู้ใช้ที่ต้องการพัฒนาใน repository หรือต้องการติดตั้งด้วยตัวเองสามารถทำได้โดยเริ่มจากการ clone repository:
git clone git@github.com:Qiskit/qiskit-addon-mpf.git
และติดตั้งแพ็กเกจผ่าน pip repository ยังมี optional dependencies หลายตัวที่เปิดใช้งานฟีเจอร์บางอย่างด้วย
ปรับตัวเลือกตามความต้องการ
pip install tox notebook -e '.[notebook-dependencies,dev]'
พื้นฐานทางทฤษฎี
MPF สามารถลด Trotter approximation error ที่เกิดจากการจำลองไดนามิกส์ของระบบควอนตัมได้ผ่านการรวมแบบ weighted ของการรัน Circuit หลายครั้ง weighted sum นี้นิยามเป็น:
โดยที่ คือ weighting coefficients, คือ density matrix ที่สอดคล้องกับ pure state ที่ได้จากการ evolve สถานะเริ่มต้นผ่าน product formula โดยประมาณ time-evolution operator ด้วย Trotter steps และ เป็น index ของแต่ละ product formula ที่ใช้ในผลรวม
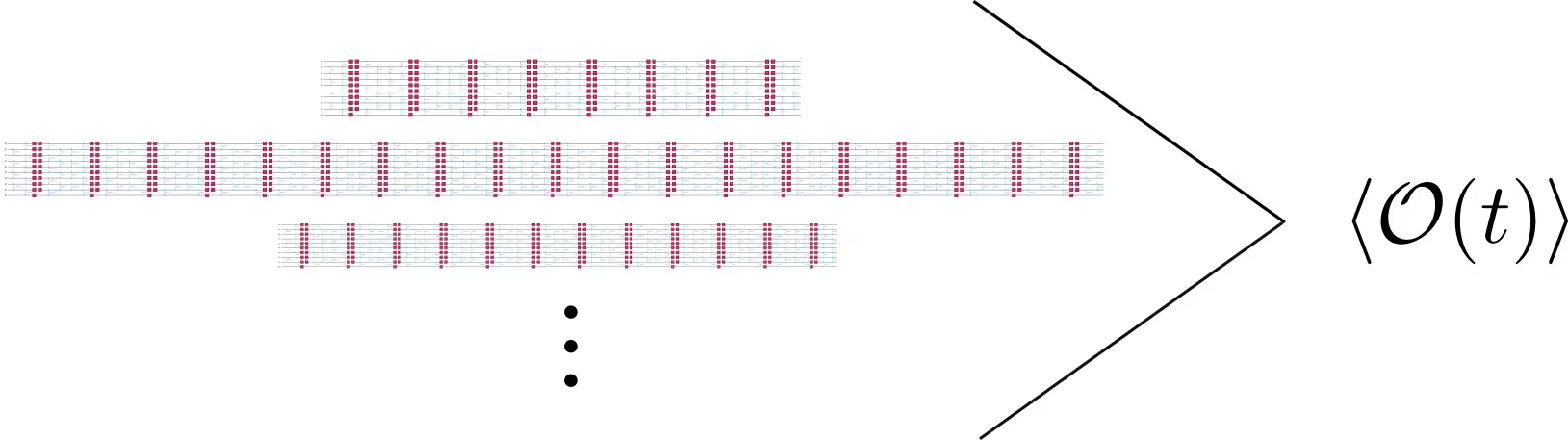
โดยทั่วไปแล้ว เป้าหมายของการจำลองไดนามิกส์ควอนตัมคือการวัด observable บางตัว ซึ่งเป็นฟังก์ชันของเวลา เมื��่อใช้ MPF จะรัน Circuit หลายตัว โดยแต่ละตัวใช้ Trotter steps เพื่อได้การวัด observable เป้าหมาย หลายครั้ง จากนั้นได้การวัด observable เป้าหมายโดยการคำนวณ:
โดยพื้นฐานแล้ว คุณสามารถลด Trotter error รวมได้โดยการประมาณ time-evolution operator ด้วย product formulas หลายตัวที่มีจำนวน Trotter steps ต่างกัน แทนที่จะใช้ product formula เพียงตัวเดียว คุณสร้าง Circuit สำหรับแต่ละ term ใน weighted sum ซึ่ง evolve ระบบตามจำนวน Trotter steps แต่ละ Circuit จะถูกรันแยกกันบน QPU เพื่อสร้างผลลัพธ์ใหม่ในขั้นตอนการประมวลผลหลัง ประโยชน์ของเทคนิคนี้มองได้จากสองมุมมอง:
- สำหรับจำนวน Trotter steps ที่กำหนดไว้ที่รัน คุณสามารถได้ผลลัพธ์ที่มี Trotter error รวมน้อยลง
- สำหรับจำนวน Trotter steps ที่ส่งผลให้ Circuit ลึกมาก คุณสามารถใช้ MPF เพื่อหา Circuit ที่มีความลึกสั้นกว่าหลายตัวมาแทน ซึ่งให้ Trotter approximation error ที่ใกล้เคียงกัน
กำหนด MPF coefficients
ฟังก์ชันหลักของแพ็กเกจ qiskit-addon-mpf อยู่ที่การกำหนด MPF coefficients (ซึ่งอาจขึ้นกับเวลา) กระบวนการได้แต่ละ เกี่ยวข้องกับการแก้ระบบสมการเชิงเส้น โดยที่ คือเวกเตอร์ของ coefficients ที่ต้องการหา คือเมทริกซ์ที่ขึ้นอยู่กับค่า และ product formula ที่ใช้ (ได้แก่ approximation order และจำนวน Trotter steps) และ คือเวกเตอร์ของเงื่อนไขบังคับ ระบบสมการนี้สามารถแก้ได้แบบ exact หรือด้วยโมเดลประมาณที่ minimize 1-norm ของ coefficients นอกจากนี้ การเลือกแต่ละ เป็นกระบวนการ heuristic แต่สามารถกำหนดขอบเขตด้วยเงื่อนไขต่อไปนี้:
- ค่า ที่ใหญ่ที่สุดถูกจำกัดโดยความลึกสูงสุดของ Circuit ที่สามารถรันได้อย่างน่าเชื่อถือ
- ที่เล็กที่สุดควรตอบสนอง เนื่องจากนั่นคือจุดที่ Trotter error มีพฤติกรรมที่ดีที่สุด
- ไม่มี coefficients ตัวใดควรใกล้ เพราะนั่นหมายความว่ามันไม่มีส่วนสำคัญต่อ MPF
- ในทำนองเดียวกัน coefficient ที่เกี่ยวข้องกับค่า ที่ใหญ่ที่สุดไม่ควรครอบงำ เพราะนั่นหมายความว่าคุณกำลังใช้ product formula เพียงตัวเดียว
- สุดท้าย norm ของ coefficients ที่ได้ควรมีค่าน้อย เพราะนี่บ่งชี้ว่า MPF มีเงื่อนไขที่ดี 1
ขั้��นตอนต่อไป
- อ่านหน้าเริ่มต้นใช้งาน MPF
เอกสารอ้างอิง
- A. Carrera Vazquez, D. J. Egger, D. Ochsner, and S. Wörner, "Well-conditioned multi-product formulas for hardware-friendly Hamiltonian simulation", Quantum 7, 1067 (2023).
- S. Zhuk, N. Robertson, and S. Bravyi, "Trotter error bounds and dynamic multi-product formulas for Hamiltonian simulation", Phys. Rev. Research 6, 033309 (2024).
- N. Robertson, et al. "Tensor Network enhanced Dynamic Multiproduct Formulas", arXiv:2407.17405v2 [quant-ph].