รูปแบบทางคณิตศาสตร์ของการวัด บทเรียนนี้เริ่มต้นด้วยคำอธิบายทางคณิตศาสตร์สองแบบที่เทียบเท่ากันของการวัด:
การวัดทั่วไปสามารถอธิบายได้ด้วย กลุ่มของเมทริกซ์ หนึ่งเมทริกซ์ต่อหนึ่งผลลัพธ์การวัด ในลักษณะที่ขยายขอบเขตจากคำอธิบายของการวัดแบบโปรเจกทีฟ
การวัดทั่วไปสามารถอธิบายได้ในฐานะ แชนแนล ที่ผลลัพธ์เป็นสถานะคลาสสิกเสมอ (แทนด้วยเมทริกซ์ความหนาแน่นแนวทแยง)
เราจะจำกัดความสนใจไว้กับการวัดที่มีผลลัพธ์ที่เป็นไปได้จำนวนจำกัด เท่านั้น
แม้ว่าจะสามารถนิยามการวัดที่มีผลลัพธ์ไม่จำกัดจำนวนได้ แต่ในบริบทของการคำนวณและการประมวลผลสารสนเทศนั้นพบได้น้อยกว่ามาก และยังต้องใช้คณิตศาสตร์เพิ่มเติม (นั่นคือทฤษฎีการวัด) เพื่อทำให้เป็นรูปแบบที่เข้มงวด
โดยเริ่มแรกเราจะมุ่งเน้นที่การวัดแบบ ทำลาย (destructive) ซึ่งผลลัพธ์ของการวัดคือผลลัพธ์คลาสสิกเพียงอย่างเดียว โดยไม่มีการระบุสถานะควอนตัมหลังการวัดของระบบที่ถูกวัด
ในแง่สัญชาตญาณ เราอาจนึกภาพว่าการวัดนั้นทำลายระบบควอนตัมเองหรือระบบถูกทิ้งทันทีหลังจากการวัดเสร็จสิ้น
ต่อไปในบทเรียนเราจะขยายมุมมองไปพิจารณาการวัดแบบ ไม่ทำลาย (non-destructive) ซึ่งมีทั้งผลลัพธ์คลาสสิกและสถานะควอนตัมหลังการวัดของระบบที่ถูกวัด
การวัดในฐานะกลุ่มของเมทริกซ์
สมมติว่า X \mathsf{X} X X \mathsf{X} X { 0 , … , n − 1 } \{0,\ldots, n-1\} { 0 , … , n − 1 } n n n X \mathsf{X} X n × n n\times n n × n X \mathsf{X} X n n n X \mathsf{X} X 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 m m m
ขอให้สังเกตว่าเราใช้ชื่อเหล่านี้เพื่อความเรียบง่าย
การขยายสิ่งที่กล่าวมาทั้งหมดไปสู่เซตจำกัดอื่น ๆ ของสถานะคลาสสิกและผลลัพธ์การวัดนั้นทำได้โดยตรง
การวัดแบบโปรเจกทีฟ
ขอทบทวนว่า การวัดแบบโปรเจกทีฟ คือการวัดที่อธิบายด้วยกลุ่มของ เมทริกซ์โปรเจกชัน ที่รวมกันได้เท่ากับเมทริกซ์เอกลักษณ์
ในสัญลักษณ์คณิตศาสตร์
{ Π 0 , … , Π m − 1 } \{\Pi_0,\ldots,\Pi_{m-1}\} { Π 0 , … , Π m − 1 } อธิบายการวัดแบบโปรเจกทีฟของ X \mathsf{X} X Π a \Pi_a Π a n × n n\times n n × n
Π 0 + ⋯ + Π m − 1 = I X \Pi_0 + \cdots + \Pi_{m-1} = \mathbb{I}_{\mathsf{X}} Π 0 + ⋯ + Π m − 1 = I X เมื่อทำการวัดดังกล่าวกับระบบ X \mathsf{X} X ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ a a a ∥ Π a ∣ ψ ⟩ ∥ 2 \|\Pi_a\vert\psi\rangle\|^2 ∥ Π a ∣ ψ ⟩ ∥ 2 X \mathsf{X} X Π a ∣ ψ ⟩ \Pi_a\vert\psi\rangle Π a ∣ ψ ⟩
ถ้าสถานะของ X \mathsf{X} X ρ \rho ρ ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ a a a Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ )
ถ้า ρ = ∣ ψ ⟩ ⟨ ψ ∣ \rho = \vert \psi\rangle\langle\psi\vert ρ = ∣ ψ ⟩ ⟨ ψ ∣
Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . \operatorname{Tr}(\Pi_a \rho)
= \operatorname{Tr}(\Pi_a \vert \psi\rangle\langle\psi \vert)
= \langle \psi \vert \Pi_a \vert \psi \rangle
= \langle \psi \vert \Pi_a \Pi_a \vert \psi \rangle
= \|\Pi_a\vert\psi\rangle\|^2. Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . ที่นี่เราใช้สมบัติวัฏจักรของเทรซสำหรับความเท่ากันที่สอง และสำหรับความเท่ากันที่สามเราใช้ข้อเท็จจริงที่ว่าแต่ละ Π a \Pi_a Π a Π a 2 = Π a \Pi_a^2 = \Pi_a Π a 2 = Π a
โดยทั่วไป ถ้า ρ \rho ρ
ρ = ∑ k = 0 N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ \rho = \sum_{k = 0}^{N-1} p_k \vert \psi_k\rangle\langle \psi_k \vert ρ = k = 0 ∑ N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ ของสถานะบริสุทธิ์ นิพจน์ Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ ) a a a ρ \rho ρ
Tr ( Π a ρ ) = ∑ k = 0 N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = ∑ k = 0 N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 \operatorname{Tr}(\Pi_a \rho)
= \sum_{k = 0}^{N-1} p_k \operatorname{Tr}(\Pi_a \vert \psi_k\rangle\langle\psi_k\vert)
= \sum_{k = 0}^{N-1} p_k \|\Pi_a\vert\psi_k\rangle\|^2 Tr ( Π a ρ ) = k = 0 ∑ N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = k = 0 ∑ N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 การวัดทั่วไป
คำอธิบายทางคณิตศาสตร์สำหรับการวัดทั่วไปได้มาจากการผ่อนคลายนิยามของการวัดแบบโปรเจกทีฟ
โดยเฉพาะอย่างยิ่ง เราอนุญาตให้เมทริกซ์ในกลุ่มที่อธิบายการวัดเป็นเมทริกซ์ กึ่งบวกแน่นอน (positive semidefinite) โดยทั่วไป แทนที่จะเป็นโปรเจกชัน
(โปรเจกชันเป็นกึ่งบวกแน่นอนเสมอ สามารถนิยามอีกแบบได้ว่าเป็นเมทริกซ์กึ่งบวกแน่นอนที่มีค่าไอเกนทั้งหมดเป็น 0 หรือ 1 เท่านั้น)
โดยเฉพาะอย่างยิ่ง การวัดทั่วไปของระบบ X \mathsf{X} X 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X \mathsf{X} X
P 0 + ⋯ + P m − 1 = I X . P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}}. P 0 + ⋯ + P m − 1 = I X . ถ้าระบบ X \mathsf{X} X ρ \rho ρ a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 } Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
ตามที่เราต้องการโดยธรรมชาติ เวกเตอร์ความน่าจะเป็นของผลลัพธ์
( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) \bigl(\operatorname{Tr}(P_0 \rho),\ldots,\operatorname{Tr}(P_{m-1} \rho)\bigr) ( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) ของการวัดทั่วไปจะเป็นเวกเตอร์ความน่าจะเป็นเสมอ สำหรับเมทริกซ์ความหนาแน่น ρ \rho ρ
ค่าแต่ละค่า Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
Q , R ≥ 0 ⇒ Tr ( Q R ) ≥ 0. Q, R \geq 0 \; \Rightarrow \: \operatorname{Tr}(QR) \geq 0. Q , R ≥ 0 ⇒ Tr ( QR ) ≥ 0. วิธีหนึ่งในการพิสูจน์ข้อเท็จจริงนี้คือใช้การสลายแบบสเปกตรัมของ Q Q Q R R R Q R QR QR
เงื่อนไข P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X
∑ a = 0 m − 1 Tr ( P a ρ ) = Tr ( ∑ a = 0 m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1 \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho)
= \operatorname{Tr}\Biggl(\sum_{a = 0}^{m-1} P_a \rho\Biggr)
= \operatorname{Tr}(\mathbb{I}\rho) = \operatorname{Tr}(\rho) = 1 a = 0 ∑ m − 1 Tr ( P a ρ ) = Tr ( a = 0 ∑ m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1
ตัวอย่างที่ 1: การวัดแบบโปรเจกทีฟใด ๆ
โปรเจกชันเป็นกึ่งบวกแน่นอนเสมอ ดังนั้นการวัดแบบโปรเจกทีฟทุกแบบเป็นตัวอย่างของการวัดทั่วไป
ตัวอย่างเช่น การวัดเบสมาตรฐานของ Qubit สามารถแทนด้วย { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
P 0 = ∣ 0 ⟩ ⟨ 0 ∣ = ( 1 0 0 0 ) and P 1 = ∣ 1 ⟩ ⟨ 1 ∣ = ( 0 0 0 1 ) . P_0 = \vert 0\rangle\langle 0\vert =
\begin{pmatrix}
1 & 0 \\ 0 & 0
\end{pmatrix}
\quad\text{and}\quad
P_1 = \vert 1\rangle\langle 1\vert =
\begin{pmatrix}
0 & 0 \\ 0 & 1
\end{pmatrix}. P 0 = ∣0 ⟩ ⟨ 0∣ = ( 1 0 0 0 ) and P 1 = ∣1 ⟩ ⟨ 1∣ = ( 0 0 0 1 ) . การวัด Qubit ในสถานะ ρ \rho ρ
Prob ( outcome = 0 ) = Tr ( P 0 ρ ) = Tr ( ∣ 0 ⟩ ⟨ 0 ∣ ρ ) = ⟨ 0 ∣ ρ ∣ 0 ⟩ Prob ( outcome = 1 ) = Tr ( P 1 ρ ) = Tr ( ∣ 1 ⟩ ⟨ 1 ∣ ρ ) = ⟨ 1 ∣ ρ ∣ 1 ⟩ \begin{aligned}
\operatorname{Prob}(\text{outcome} = 0)
& = \operatorname{Tr}(P_0 \rho) =
\operatorname{Tr}\bigl(\vert 0\rangle\langle 0\vert \rho\bigr) =
\langle 0\vert \rho \vert 0 \rangle \\[1mm]
\operatorname{Prob}(\text{outcome} = 1)
& = \operatorname{Tr}(P_1 \rho) =
\operatorname{Tr}\bigl(\vert 1\rangle\langle 1\vert\rho\bigr) =
\langle 1 \vert \rho \vert 1 \rangle
\end{aligned} Prob ( outcome = 0 ) Prob ( outcome = 1 ) = Tr ( P 0 ρ ) = Tr ( ∣0 ⟩ ⟨ 0∣ ρ ) = ⟨ 0∣ ρ ∣0 ⟩ = Tr ( P 1 ρ ) = Tr ( ∣1 ⟩ ⟨ 1∣ ρ ) = ⟨ 1∣ ρ ∣1 ⟩ ตัวอย่างที่ 2: การวัด Qubit แบบไม่โปรเจกทีฟ
สมมติว่า X \mathsf{X} X
P 0 = ( 2 3 1 3 1 3 1 3 ) P 1 = ( 1 3 − 1 3 − 1 3 2 3 ) P_0 =
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\qquad
P_1 =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix} P 0 = ( 3 2 3 1 3 1 3 1 ) P 1 = ( 3 1 − 3 1 − 3 1 3 2 ) ทั้งสองเป็นเมทริกซ์กึ่งบวกแน่นอน: เป็นเมทริกซ์เฮอร์มิเชียน และในทั้งสองกรณีค่าไอเกนคือ 1 / 2 ± 5 / 6 1/2 \pm \sqrt{5}/6 1/2 ± 5 /6 P 0 + P 1 = I P_0 + P_1 = \mathbb{I} P 0 + P 1 = I { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
ถ้าสถานะของ X \mathsf{X} X ρ \rho ρ 0 0 0 Tr ( P 0 ρ ) \operatorname{Tr}(P_0 \rho) Tr ( P 0 ρ ) 1 1 1 Tr ( P 1 ρ ) \operatorname{Tr}(P_1 \rho) Tr ( P 1 ρ ) ρ = ∣ + ⟩ ⟨ + ∣ \rho = \vert + \rangle \langle + \vert ρ = ∣ + ⟩ ⟨ + ∣ 0 0 0 1 1 1
Tr ( P 0 ρ ) = Tr ( ( 2 3 1 3 1 3 1 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 2 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) + ( 1 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) = 1 2 + 1 3 = 5 6 Tr ( P 1 ρ ) = Tr ( ( 1 3 − 1 3 − 1 3 2 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 1 3 ⋅ 1 2 − 1 3 ⋅ 1 2 ) + ( − 1 3 ⋅ 1 2 + 2 3 ⋅ 1 2 ) = 0 + 1 6 = 1 6 \begin{aligned}
\operatorname{Tr}(P_0 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{2}{3} \cdot \frac{1}{2} + \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(\frac{1}{3}\cdot\frac{1}{2} + \frac{1}{3}\cdot\frac{1}{2}\biggr)\\
& = \frac{1}{2} + \frac{1}{3} = \frac{5}{6}\\[4mm]
\operatorname{Tr}(P_1 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{1}{3} \cdot \frac{1}{2} - \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(-\frac{1}{3}\cdot\frac{1}{2} + \frac{2}{3}\cdot\frac{1}{2}\biggr)\\
& = 0 + \frac{1}{6} = \frac{1}{6}
\end{aligned} Tr ( P 0 ρ ) Tr ( P 1 ρ ) = Tr ( ( 3 2 3 1 3 1 3 1 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 2 ⋅ 2 1 + 3 1 ⋅ 2 1 ) + ( 3 1 ⋅ 2 1 + 3 1 ⋅ 2 1 ) = 2 1 + 3 1 = 6 5 = Tr ( ( 3 1 − 3 1 − 3 1 3 2 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 1 ⋅ 2 1 − 3 1 ⋅ 2 1 ) + ( − 3 1 ⋅ 2 1 + 3 2 ⋅ 2 1 ) = 0 + 6 1 = 6 1 ตัวอย่างที่ 3: การวัดแบบทรงสี่หน้า
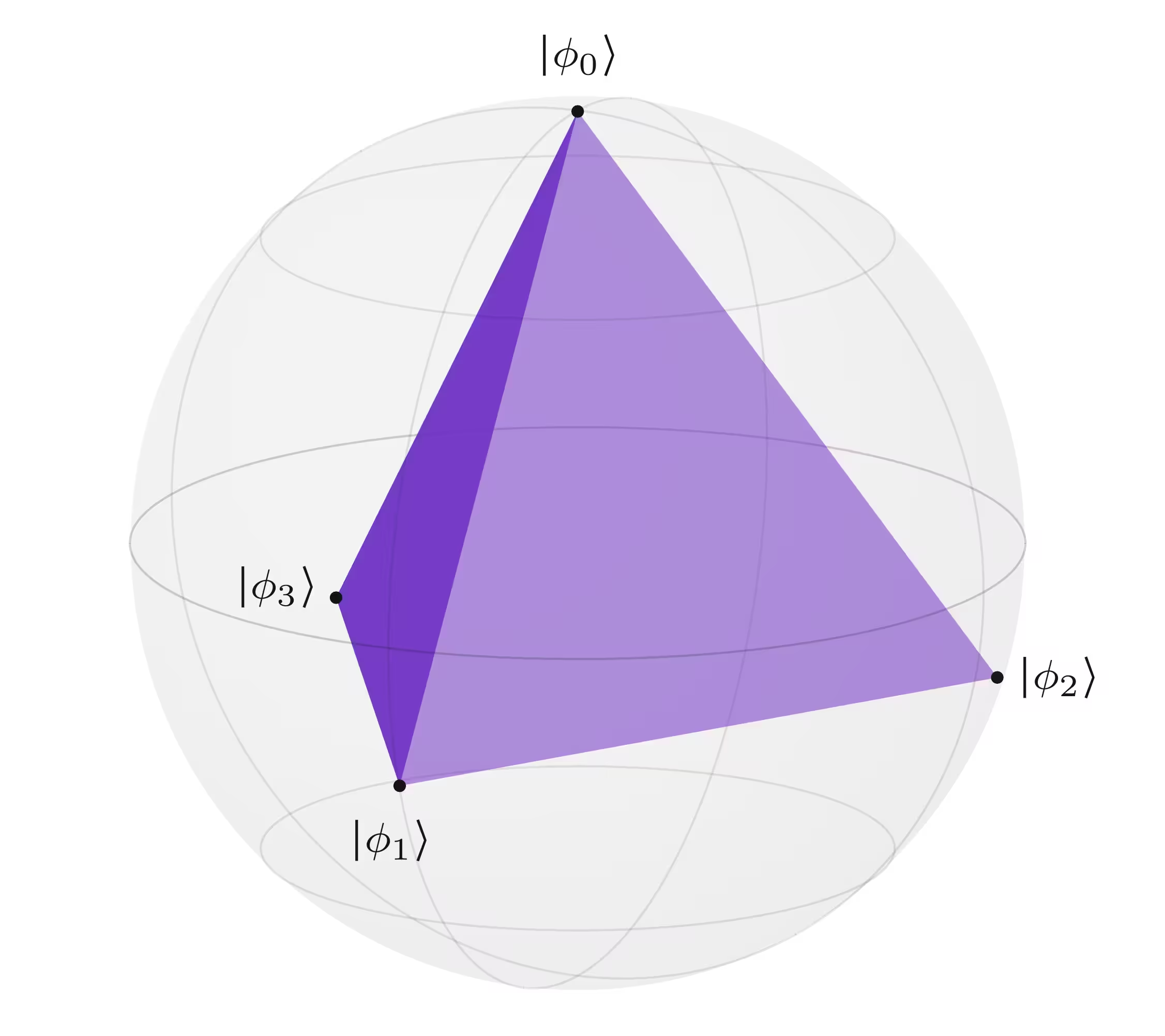
นิยามเวกเตอร์สถานะควอนตัม Qubit เดี่ยวสี่ตัวดังนี้
∣ ϕ 0 ⟩ = ∣ 0 ⟩ ∣ ϕ 1 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 ∣ 1 ⟩ ∣ ϕ 2 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e 2 π i / 3 ∣ 1 ⟩ ∣ ϕ 3 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e − 2 π i / 3 ∣ 1 ⟩ \begin{aligned}
\vert\phi_0\rangle & = \vert 0 \rangle\\
\vert\phi_1\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} \vert 1\rangle \\
\vert\phi_2\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{2\pi i/3} \vert 1\rangle \\
\vert\phi_3\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{-2\pi i/3} \vert 1\rangle
\end{aligned} ∣ ϕ 0 ⟩ ∣ ϕ 1 ⟩ ∣ ϕ 2 ⟩ ∣ ϕ 3 ⟩ = ∣0 ⟩ = 3 1 ∣0 ⟩ + 3 2 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e 2 πi /3 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e − 2 πi /3 ∣1 ⟩ สถานะทั้งสี่นี้บางครั้งเรียกว่า สถานะทรงสี่หน้า (tetrahedral states) เพราะเป็นจุดยอดของ ทรงสี่หน้าปกติ (regular tetrahedron) ที่ถูกจารึกภายในโกลกบลอค
พิกัดคาร์ทีเซียนของสถานะทั้งสี่นี้บนโกลกบลอคคือ
( 0 , 0 , 1 ) , ( 2 2 3 , 0 , − 1 3 ) , ( − 2 3 , 2 3 , − 1 3 ) , ( − 2 3 , − 2 3 , − 1 3 ) , (0,0,1),\\[2mm]
\left( \frac{2\sqrt{2}}{3} , 0 , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , \sqrt{\frac{2}{3}} , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , -\sqrt{\frac{2}{3}} , -\frac{1}{3} \right), ( 0 , 0 , 1 ) , ( 3 2 2 , 0 , − 3 1 ) , ( − 3 2 , 3 2 , − 3 1 ) , ( − 3 2 , − 3 2 , − 3 1 ) , ซึ่งสามารถตรวจสอบได้โดยการแสดงเมทริกซ์ความหนาแน่นของสถานะเหล่านี้ในรูปการรวมเชิงเส้นของเมทริกซ์เพาลี
∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = I + σ z 2 \vert \phi_0 \rangle\langle \phi_0 \vert =
\begin{pmatrix}
1 & 0\\[1mm] 0 & 0
\end{pmatrix}
= \frac{\mathbb{I} + \sigma_z}{2} ∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = 2 I + σ z ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = ( 1 3 2 3 2 3 2 3 ) = I + 2 2 3 σ x − 1 3 σ z 2 \vert \phi_1 \rangle\langle \phi_1 \vert =
\begin{pmatrix}
\frac{1}{3} & \frac{\sqrt{2}}{3} \\[2mm]
\frac{\sqrt{2}}{3} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} + \frac{2\sqrt{2}}{3} \sigma_x - \frac{1}{3}\sigma_z}{2} ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = 3 1 3 2 3 2 3 2 = 2 I + 3 2 2 σ x − 3 1 σ z ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 1 3 − 1 3 2 − i 6 − 1 3 2 + i 6 2 3 ) = I − 2 3 σ x + 2 3 σ y − 1 3 σ z 2 \vert \phi_2 \rangle\langle \phi_2 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x + \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 3 1 − 3 2 1 + 6 i − 3 2 1 − 6 i 3 2 ) = 2 I − 3 2 σ x + 3 2 σ y − 3 1 σ z ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 1 3 − 1 3 2 + i 6 − 1 3 2 − i 6 2 3 ) = I − 2 3 σ x − 2 3 σ y − 1 3 σ z 2 \vert \phi_3 \rangle\langle \phi_3 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x - \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 3 1 − 3 2 1 − 6 i − 3 2 1 + 6 i 3 2 ) = 2 I − 3 2 σ x − 3 2 σ y − 3 1 σ z สถานะทั้งสี่นี้กระจายตัวอย่างสมบูรณ์แบบบนโกลกบลอค โดยแต่ละสถานะอยู่ห่างจากสามสถานะที่เหลือเท่ากัน และมุมระหว่างสถานะสองสถานะใด ๆ จะเท่ากันเสมอ
ตอนนี้ให้นิยามการวัด { P 0 , P 1 , P 2 , P 3 } \{P_0,P_1,P_2,P_3\} { P 0 , P 1 , P 2 , P 3 } P a P_a P a a = 0 , … , 3 a=0,\ldots,3 a = 0 , … , 3
P a = ∣ ϕ a ⟩ ⟨ ϕ a ∣ 2 P_a = \frac{\vert\phi_a\rangle\langle\phi_a\vert}{2} P a = 2 ∣ ϕ a ⟩ ⟨ ϕ a ∣ เราสามารถตรวจสอบว่านี่เป็นการวัดที่ถูกต้องดังนี้
แต่ละ P a P_a P a 1 / 2 1/2 1/2
ผลรวมของเมทริกซ์เหล่านี้คือเมทริกซ์เอกลักษณ์: P 0 + P 1 + P 2 + P 3 = I P_0 + P_1 + P_2 + P_3 = \mathbb{I} P 0 + P 1 + P 2 + P 3 = I
การวัดในฐานะแชนแนล
อีกวิธีหนึ่งในการอธิบายการวัดในเชิงคณิตศาสตร์คือในฐานะแชนแนล
สารสนเทศคลาสสิกสามารถมองได้ว่าเป็นกรณีพิเศษของสารสนเทศควอนตัม เนื่องจากเราสามารถระบุสถานะความน่าจะเป็นด้วยเมทริกซ์ความหนาแน่นแนวทแยงได้
ดังนั้น ในแง่ของการปฏิบัติ เราสามารถมองการวัดเป็นแชนแนลที่รับอินพุตเป็นเมทริกซ์ที่อธิบายสถานะของระบบที่กำลังวัด และผลลัพธ์เป็นเมทริกซ์ความหนาแน่นแนวทแยง ที่อธิบายการแจกแจงของผลลัพธ์การวัด
เราจะเห็นในไม่ช้าว่าแชนแนลใด ๆ ที่มีคุณสมบัตินี้สามารถเขียนในรูปแบบแคโนนิกาลที่เรียบง่ายซึ่งเชื่อมโยงโดยตรงกับคำอธิบายของการวัดในฐานะกลุ่มของเมทริกซ์กึ่งบวกแน่นอน
ในทางกลับกัน สำหรับการวัดทั่วไปที่กำหนดเป็นกลุ่มของเมทริกซ์ มีแชนแนลที่ถูกต้องเสมอซึ่งมีคุณสมบัติเอาต์พุตแนวทแยงที่อธิบายการวัดที่กำหนดตามที่แนะนำในย่อหน้าก่อนหน้า
เมื่อนำข้อสังเกตเหล่านี้มารวมกัน เราพบว่าการอธิบายสองแบบของการวัดทั่วไปนั้นเทียบเท่ากัน
ก่อนดำเนินการต่อ ให้เราระบุอย่างแม่นยำมากขึ้นเกี่ยวกับการวัด วิธีที่เรามองว่าเป็นแชนแนล และสมมติฐานที่เราใช้
เช่นเดิม เราสมมติว่า X \mathsf{X} X 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 m m m Y \mathsf{Y} Y { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 } Φ \Phi Φ X \mathsf{X} X Y \mathsf{Y} Y Y \mathsf{Y} Y คลาสสิก — กล่าวคือไม่ว่าจะเริ่มต้นด้วยสถานะใดสำหรับ X \mathsf{X} X Y \mathsf{Y} Y
เราสามารถแสดงในเชิงคณิตศาสตร์ว่าเอาต์พุตของ Φ \Phi Φ Δ m \Delta_m Δ m Y \mathsf{Y} Y
Δ m ( σ ) = ∑ a = 0 m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ \Delta_m(\sigma) = \sum_{a = 0}^{m-1} \langle a \vert \sigma \vert a\rangle \,\vert a\rangle\langle a\vert Δ m ( σ ) = a = 0 ∑ m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ แชนแนลนี้คล้ายกับแชนแนลดีเฟส Qubit โดยสมบูรณ์ Δ \Delta Δ
และตอนนี้ วิธีง่าย ๆ ในการแสดงว่าเมทริกซ์ความหนาแน่น σ \sigma σ σ = Δ m ( σ ) \sigma = \Delta_m(\sigma) σ = Δ m ( σ ) Φ \Phi Φ Y \mathsf{Y} Y
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) สำหรับเมทริกซ์ความหนาแน่น ρ \rho ρ X \mathsf{X} X
จากแชนแนลสู่เมทริกซ์
สมมติว่าเรามีแชนแนลจาก X \mathsf{X} X Y \mathsf{Y} Y
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) สำหรับเมทริกซ์ความหนาแน่น ρ \rho ρ
Φ ( ρ ) = ∑ a = 0 m − 1 ⟨ a ∣ Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ (1) \Phi(\rho) =
\sum_{a = 0}^{m-1} \langle a \vert \Phi(\rho) \vert a\rangle\, \vert a\rangle\langle a \vert
\tag{1} Φ ( ρ ) = a = 0 ∑ m − 1 ⟨ a ∣Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ ( 1 ) เช่นเดียวกับแชนแนลทั้งหมด เราสามารถแสดง Φ \Phi Φ A 0 , … , A N − 1 A_0,\ldots,A_{N-1} A 0 , … , A N − 1
Φ ( ρ ) = ∑ k = 0 N − 1 A k ρ A k † \Phi(\rho) = \sum_{k = 0}^{N-1} A_k \rho A_k^{\dagger} Φ ( ρ ) = k = 0 ∑ N − 1 A k ρ A k † ซึ่งให้นิพจน์ทางเลือกสำหรับรายการแนวทแยงของ Φ ( ρ ) : \Phi(\rho)\!: Φ ( ρ ) :
⟨ a ∣ Φ ( ρ ) ∣ a ⟩ = ∑ k = 0 N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = ∑ k = 0 N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) \begin{aligned}
\langle a \vert \Phi(\rho) \vert a\rangle
& = \sum_{k = 0}^{N-1} \langle a \vert A_k \rho A_k^{\dagger} \vert a\rangle \\
& = \sum_{k = 0}^{N-1} \operatorname{Tr}\bigl( A_k^{\dagger} \vert a\rangle\langle a \vert A_k \rho\bigr)\\
& = \operatorname{Tr}\bigl(P_a\rho\bigr)
\end{aligned} ⟨ a ∣Φ ( ρ ) ∣ a ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = k = 0 ∑ N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) สำหรับ
P a = ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . P_a = \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k. P a = k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . ดังนั้น สำหรับเมทริกซ์ P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 Φ \Phi Φ
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a\rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ นิพจน์นี้สอดคล้องกับคำอธิบายของการวัดทั่วไปในเชิงเมทริกซ์ เนื่องจากเราเห็นแต่ละผลลัพธ์การวัดปรากฏด้วยความน่าจะเป็น Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
ตอนนี้ให้สังเกตว่าคุณสมบัติสองประการที่กำหนดให้กลุ่มของเมทริกซ์ { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } ∣ ψ ⟩ \vert \psi\rangle ∣ ψ ⟩ X \mathsf{X} X
⟨ ψ ∣ P a ∣ ψ ⟩ = ∑ k = 0 N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = ∑ k = 0 N − 1 ∣ ⟨ a ∣ A k ∣ ψ ⟩ ∣ 2 ≥ 0. \langle \psi \vert P_a \vert \psi\rangle
= \sum_{k = 0}^{N-1} \langle \psi \vert A_k^{\dagger} \vert a\rangle\langle a \vert A_k\vert \psi\rangle
= \sum_{k = 0}^{N-1} \bigl\vert\langle a \vert A_k\vert \psi\rangle\bigr\vert^2 \geq 0. ⟨ ψ ∣ P a ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ∣ ψ ⟩ 2 ≥ 0. คุณสมบัติที่สองคือถ้าเราบวกเมทริกซ์เหล่านี้เราจะได้เมทริกซ์เอกลักษณ์
∑ a = 0 m − 1 P a = ∑ a = 0 m − 1 ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = ∑ k = 0 N − 1 A k † ( ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = ∑ k = 0 N − 1 A k † A k = I X \begin{aligned}
\sum_{a = 0}^{m-1} P_a
& = \sum_{a = 0}^{m-1} \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} \Biggl(\sum_{a = 0}^{m-1} \vert a\rangle\langle a \vert\Biggr) A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} A_k \\
& = \mathbb{I}_{\mathsf{X}}
\end{aligned} a = 0 ∑ m − 1 P a = a = 0 ∑ m − 1 k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = k = 0 ∑ N − 1 A k † ( a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = k = 0 ∑ N − 1 A k † A k = I X ความเท่ากันสุดท้ายมาจากข้อเท็จจริงที่ว่า Φ \Phi Φ
จากเมทริกซ์สู่แชนแนล
ตอนนี้ให้ตรวจสอบว่าสำหรับกลุ่มของเมทริกซ์กึ่งบวกแน่นอน { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a \rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ เป็นแชนแนลที่ถูกต้องจาก X \mathsf{X} X Y \mathsf{Y} Y
วิธีหนึ่งในการทำเช่นนี้คือคำนวณการแทนแบบ Choi ของการแมปนี้
J ( Φ ) = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = ∑ a = 0 m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ \begin{aligned}
J(\Phi) & = \sum_{b,c = 0}^{n-1} \vert b \rangle \langle c \vert \otimes \Phi(\vert b \rangle \langle c \vert)\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle c \vert \otimes
\operatorname{Tr}(P_a \vert b \rangle \langle c \vert) \vert a \rangle\langle a\vert\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle b \vert P_a^T \vert c \rangle \langle c \vert \otimes
\vert a \rangle\langle a\vert\\[1mm]
& = \sum_{a = 0}^{m-1} P_a^T \otimes \vert a \rangle\langle a\vert
\end{aligned} J ( Φ ) = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = a = 0 ∑ m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ ทรานสโพสของแต่ละ P a P_a P a
⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ . \langle c \vert P_a \vert b\rangle = \langle b \vert P_a^T \vert c\rangle. ⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ . ซึ่งทำให้นิพจน์ ∣ b ⟩ ⟨ b ∣ \vert b \rangle \langle b \vert ∣ b ⟩ ⟨ b ∣ ∣ c ⟩ ⟨ c ∣ \vert c \rangle \langle c \vert ∣ c ⟩ ⟨ c ∣ b b b c c c
จากสมมติฐานที่ว่า P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 P 0 T , … , P m − 1 T P_0^{T},\ldots,P_{m-1}^{T} P 0 T , … , P m − 1 T J ( Φ ) J(\Phi) J ( Φ ) Y \mathsf{Y} Y
Tr Y ( J ( Φ ) ) = ∑ a = 0 m − 1 P a T = I X T = I X , \operatorname{Tr}_{\mathsf{Y}} (J(\Phi)) = \sum_{a = 0}^{m-1} P_a^T = \mathbb{I}_{\mathsf{X}}^T = \mathbb{I}_{\mathsf{X}}, Tr Y ( J ( Φ )) = a = 0 ∑ m − 1 P a T = I X T = I X , ดังนั้นเราจึงสรุปได้ว่า Φ \Phi Φ
การวัดบางส่วน
สมมติว่าเรามีหลายระบบที่อยู่ในสถานะควอนตัมร่วมกัน และมีการทำการวัดทั่วไปกับระบบหนึ่งในนั้น
ผลที่ได้คือหนึ่งในผลลัพธ์การวัด ซึ่งถูกเลือกแบบสุ่มตามความน่าจะเป็นที่กำหนดโดยการวัดและสถานะของระบบก่อนการวัด
สถานะที่เกิดขึ้นของระบบที่เหลือจะขึ้นอยู่กับผลลัพธ์การวัดที่ได้รับโดยทั่วไป
ให้เราตรวจสอบว่านี่ทำงานอย่างไรสำหรับคู่ระบบ ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) X \mathsf{X} X Z \mathsf{Z} Z Y \mathsf{Y} Y
สมมติว่าสถานะของ ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ
ρ = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c \rho = \sum_{b,c = 0}^{n-1} \vert b\rangle\langle c\vert \otimes \rho_{b,c} ρ = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ในนิพจน์นี้เราสมมติว่าสถานะคลาสสิกของ X \mathsf{X} X 0 , … , n − 1 0,\ldots,n-1 0 , … , n − 1
เราสมมติว่าการวัดนั้นอธิบายด้วยกลุ่มของเมทริกซ์
{ P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } Φ \Phi Φ X \mathsf{X} X Y \mathsf{Y} Y Y \mathsf{Y} Y { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 }
Φ ( ξ ) = ∑ a = 0 m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ \Phi(\xi) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \xi)\, \vert a \rangle \langle a \vert Φ ( ξ ) = a = 0 ∑ m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ ความน่าจะเป็นของผลลัพธ์
เราพิจารณาการวัดระบบ X \mathsf{X} X ρ X \rho_{\mathsf{X}} ρ X X \mathsf{X} X a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}\bigl( P_a \rho_{\mathsf{X}}\bigr) =
\operatorname{Tr}\bigl( P_a \operatorname{Tr}_{\mathsf{Z}}(\rho)\bigr) =
\operatorname{Tr}\bigl( (P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho \bigr) Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) นิพจน์แรกแทนความน่าจะเป็นที่จะได้ผลลัพธ์ a a a ρ X = Tr Z ( ρ ) \rho_{\mathsf{X}} = \operatorname{Tr}_{\mathsf{Z}}(\rho) ρ X = Tr Z ( ρ )
การได้นิพจน์ที่สามต้องคิดมากขึ้น — ผู้เรียนควรลองพิสูจน์ด้วยตัวเองว่าเป็นจริง
ต่อไปนี้คือคำใบ้: ความเทียบเท่าระหว่างนิพจน์ที่สองและที่สามไม่ขึ้นอยู่กับว่า ρ \rho ρ P a P_a P a ρ = M ⊗ N \rho = M\otimes N ρ = M ⊗ N
แม้ว่าความเทียบเท่าของนิพจน์แรกและที่สามในสมการก่อนหน้าอาจไม่ชัดเจนในทันที แต่ก็สมเหตุสมผล
จากการวัดบน X \mathsf{X} X ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) Z \mathsf{Z} Z X \mathsf{X} X
{ P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . \{P_0\otimes\mathbb{I}_{\mathsf{Z}}, \ldots, P_{m-1}\otimes\mathbb{I}_{\mathsf{Z}}\}. { P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . สถานะที่มีเงื่อนไขตามผลลัพธ์การวัด
ถ้าเราต้องการกำหนดไม่เพียงแค่ความน่าจะเป็นของผลลัพธ์ต่าง ๆ แต่ยังรวมถึงสถานะที่เกิดขึ้นของ Z \mathsf{Z} Z Φ \Phi Φ X \mathsf{X} X Z \mathsf{Z} Z
( Φ ⊗ Id Z ) ( ρ ) = ∑ b , c = 0 n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = ∑ a = 0 m − 1 ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) \begin{aligned}
(\Phi\otimes\operatorname{Id}_{\mathsf{Z}})(\rho)
& = \sum_{b,c = 0}^{n-1} \Phi(\vert b\rangle\langle c\vert) \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \sum_{b,c = 0}^{n-1} \operatorname{Tr}(P_a \vert b\rangle\langle c\vert)
\,\vert a\rangle \langle a \vert \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes \sum_{b,c = 0}^{n-1}
\operatorname{Tr}(P_a \vert b\rangle\langle c\vert) \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\sum_{b,c = 0}^{n-1} \operatorname{Tr}_{\mathsf{X}}\bigl((P_a\otimes\mathbb{I}_{\mathsf{Z}})
(\vert b\rangle\langle c\vert\otimes\rho_{b,c})\bigr)\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho\bigr)
\end{aligned} ( Φ ⊗ Id Z ) ( ρ ) = b , c = 0 ∑ n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = a = 0 ∑ m − 1 b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) ขอสังเกตว่านี่คือเมทริกซ์ความหนาแน่นโดยอาศัยข้อเท็จจริงที่ว่า Φ \Phi Φ Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
ขั้นตอนสุดท้ายหนึ่งขั้นจะแปลงนิพจน์นี้ให้กลายเป็นนิพจน์ที่เปิดเผยสิ่งที่เราต้องการ
∑ a = 0 m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) \sum_{a = 0}^{m-1} \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)\,
\vert a\rangle \langle a \vert \otimes \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)} a = 0 ∑ m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) นี่คือตัวอย่างของ สถานะควอนตัม-คลาสสิก
∑ a = 0 m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , \sum_{a = 0}^{m-1} p(a)\, \vert a\rangle\langle a\vert \otimes \sigma_a, a = 0 ∑ m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , เช่นเดียวกับที่เราเห็นในบทเรียน เมทริกซ์ความหนาแน่น
สำหรับแต่ละผลลัพธ์การวัด a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) ว่า Y \mathsf{Y} Y ∣ a ⟩ ⟨ a ∣ \vert a \rangle \langle a \vert ∣ a ⟩ ⟨ a ∣ Z \mathsf{Z} Z
σ a = Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) . (2) \sigma_a = \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}.
\tag{2} σ a = Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) . ( 2 ) นั่นคือ นี่คือเมทริกซ์ความหนาแน่นที่ได้จากการนอร์มัลไลซ์
Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ ) โดยการหารด้วยเทรซของมัน
(พูดอย่างเป็นทางการ สถานะ σ a \sigma_a σ a p ( a ) p(a) p ( a ) p ( a ) = 0 p(a) = 0 p ( a ) = 0
โดยธรรมชาติ ความน่าจะเป็นของผลลัพธ์สอดคล้องกับข้อสังเกตก่อนหน้าของเรา
โดยสรุป นี่คือสิ่งที่เกิดขึ้นเมื่อทำการวัด { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X \mathsf{X} X ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ
แต่ละผลลัพธ์ a a a p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ )
มีเงื่อนไขว่าได้ผลลัพธ์ a a a Z \mathsf{Z} Z σ a \sigma_a σ a ( 2 ) (2) ( 2 ) Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
การขยายทั่วไป
เราสามารถปรับคำอธิบายนี้ให้เข้ากับสถานการณ์อื่น ๆ เช่น เมื่อลำดับของระบบสลับกันหรือเมื่อมีสามระบบขึ้นไป
แนวคิดนั้นตรงไปตรงมา แม้ว่าการเขียนสูตรอาจยุ่งยากขึ้น
โดยทั่วไป ถ้าเรามี r r r X 1 , … , X r \mathsf{X}_1,\ldots,\mathsf{X}_r X 1 , … , X r ( X 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_r) ( X 1 , … , X r ) ρ \rho ρ { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X k \mathsf{X}_k X k
แต่ละผลลัพธ์ a a a
p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) . p(a) = \operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr). p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) .
มีเงื่อนไขว่าได้ผลลัพธ์ a a a ( X 1 , … , X k − 1 , X k + 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_{k-1},\mathsf{X}_{k+1},\ldots,\mathsf{X}_r) ( X 1 , … , X k − 1 , X k + 1 , … , X r )
Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) \frac{\operatorname{Tr}_{\mathsf{X}_k}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)}{\operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)} Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ )